Robotergestützte, automatisierte Finish- und Korrekturbearbeitungen im Werkzeugbau
Herausforderung
Die Nacharbeit von Umformwerkzeugen im Rahmen des TryOut-Prozesses verursacht einen bedeutenden Teil der Kosten- und Zeitaufwände im Werkzeugentstehungsprozess. Ursache dafür sind u. a. die vorwiegend manuell ausgeführten Arbeiten beim Glätten der Fräsriefen und lokale Korrekturschritte. Der Nachbearbeitungsprozess beruht zu einem Großteil auf Erfahrungswissen und dem Handgefühl des Bedieners, was bisher wesentliche Hürden für eine automatisierte Umsetzung des Prozesses waren. Weitere Herausforderungen sind die Gewährleistung der Bauteilkontur und die Steuerung des Materialabtrags im Bereich weniger Mikrometer.
Lösungsansatz
Für eine Adaption der händischen Bearbeitungen wurde am Fraunhofer IWU ein kraftgesteuerter Schleifprozess entwickelt. Basierend auf einer regelbaren, pneumatischen Werkzeugaufnahme ist damit die Feinbearbeitung von Oberflächen ohne Beeinflussung der Bauteilkontur möglich. Elastische Schleifwerkzeuge mit hochharten Schleifmitteln (kubisches Bornitrid) gewährleisten dabei gleichbleibende Kontaktbedingungen und Abtragraten. Eine umfangreiche Modellierung des zeit- und kraftgesteuerten Schleifprozesses bildet die Grundlage einer präzisen Steuerung des Materialabtrags über Prozessparameter wie Schleifkraft und Vorschubgeschwindigkeit.
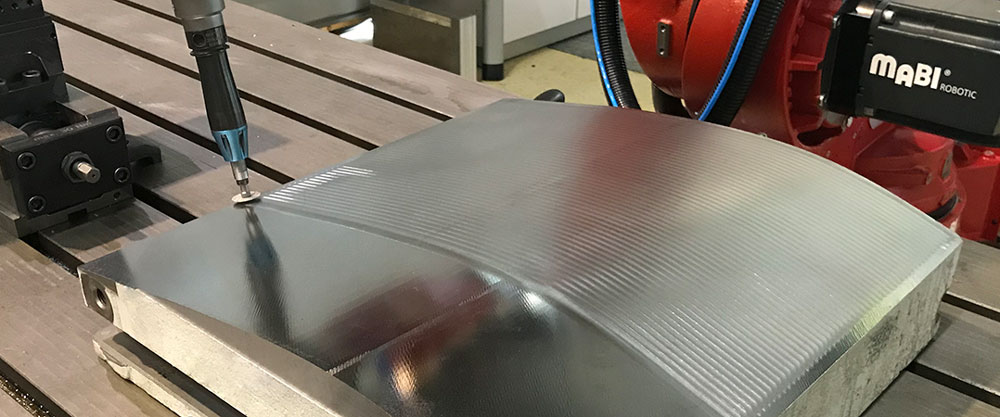
Als Bearbeitungsplattform für die kraftgeregelte Bearbeitung kommt ein 6-Achs-Roboter zum Einsatz. Der große Arbeitsraum und die hohe Flexibilität des Roboters ermöglichen die Bearbeitung großer Werkzeugbereiche und eine gute Zugänglichkeit zum Werkstück. Die Programmerstellung erfolgt mithilfe einer CAM-Software, die spezialisierte NC-Jobs für die Glättungsbearbeitung und lokale Nacharbeiten umfasst. Durch die vorangegangene Simulation der Bearbeitung werden Stillstände und Einrichtungsarbeiten am Roboter minimiert.
Einblicke in das Projekt
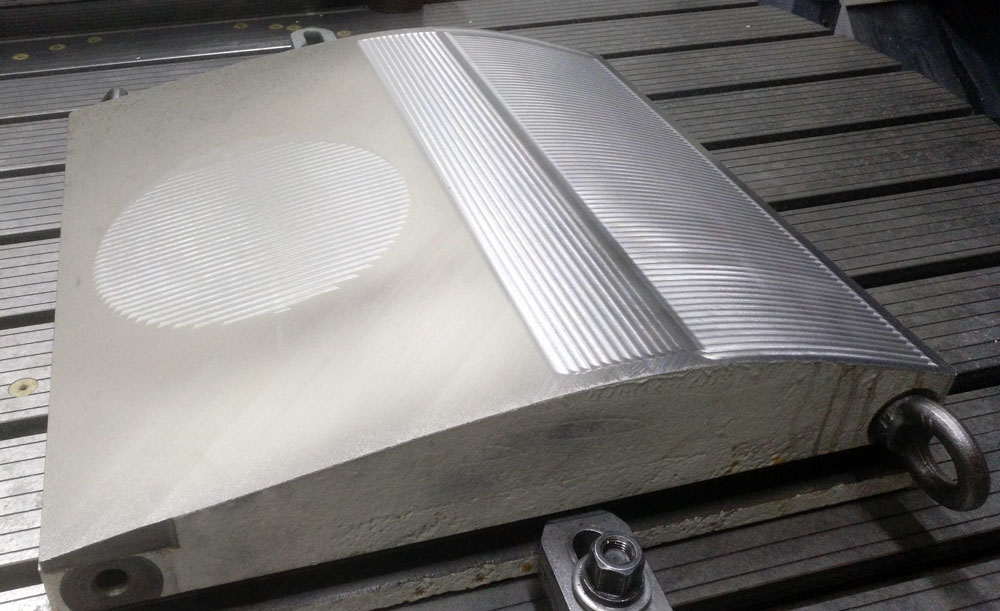
Bauteil mit rundem Korrekturbereich und Glättungsbereichen
Videos zum Projekt
Eckdaten zum Projekt
Laufzeit:
August 2017 bis Dezember 2022
Koordination:
Forschungszentrum Jülich
Projektpartner:
- Heinz Schwarz GmbH & Co KG
- Tebis AG
- Diamant-Gesellschaft Tesch GmbH
- robot-machining GmbH
