Im Bereich der Montagetechnik setzen wir der zunehmenden Variantenvielfalt neuartige und wirtschaftliche Technologien entgegen. Ein Kernanliegen unserer Forschung ist die Entwicklung von Produktionssystemen, die ein hohes Maß an Flexibilität und Autonomie aufweisen. Mit der Forschungsfabrik »Ressourceneffiziente Produktion« sind wir in der Lage, wesentliche Fertigungseinheiten der Karosserieproduktion abzubilden und Lösungen für den Automobilbau von morgen in ihrer Gesamtheit zu analysieren und unter realistischen Produktionsbedingungen zu testen.
Trends
- sensitive Robotik für komplexe Montageaufgaben
- Systeme zur Mensch-Roboter-Kooperation
- wissensbasierte Prozessregelung auf Basis der Künstlichen Intelligenz
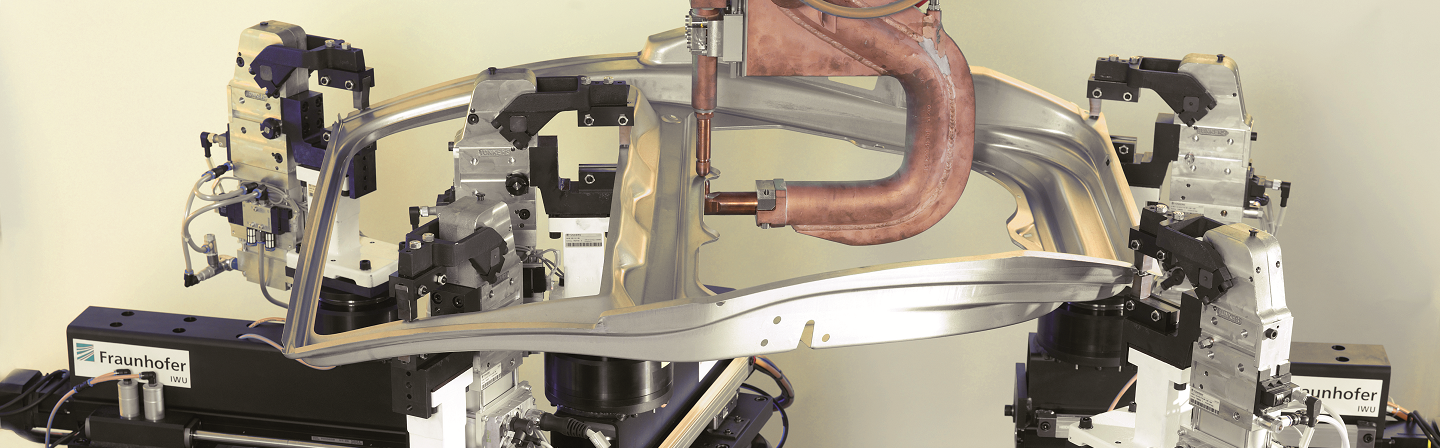
- flexible Handhabe-, Vorrichtungs- und Fügetechnik
- anwendungsspezifische und kostenoptimierte Robotersysteme
- Software zur intelligenten Automatisierung von Planungs- und Entwicklungsaufgaben und deren Optimierung
- bionischer Leichtbau von Fügeanlagen

