Vom Greifen zum Drucken: Automatisierte Kabelverlegung neu gedacht
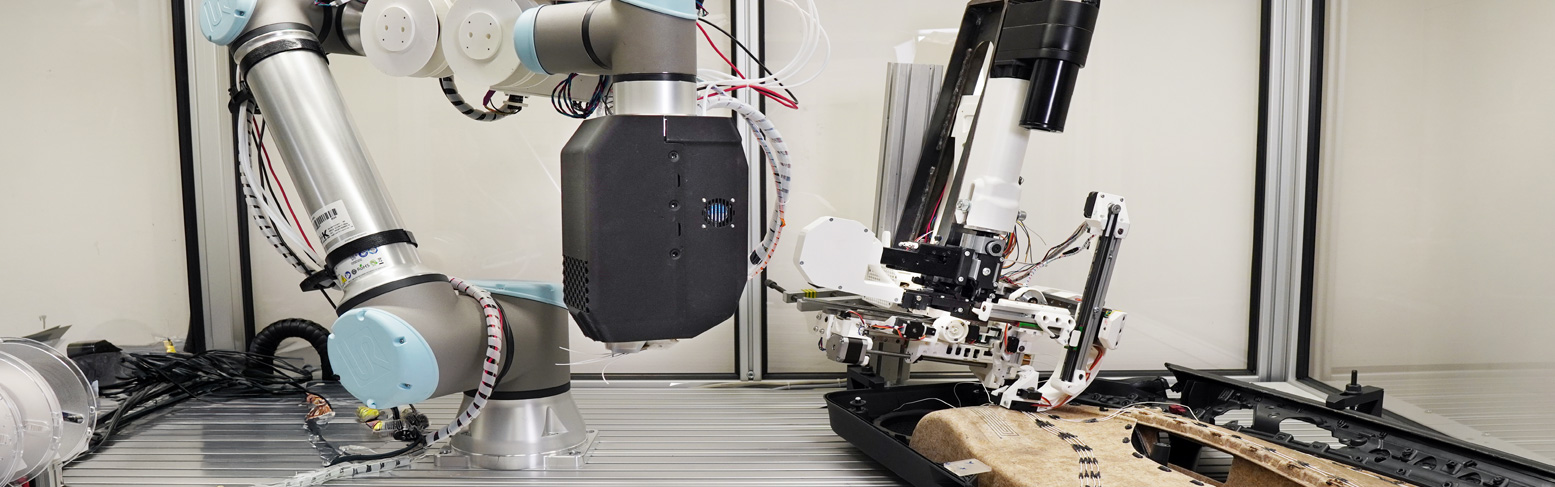
Das Handling und die automatisierte Montage eines Leitungssatzes, bestehend aus mehreren Kabeln mit unterschiedlichen Längen, Querschnitten und Endkontakten, ist für ein Robotersystem äußerst schwierig zu handhaben. Aus diesem Grund sind die Lösungen in der Regel mit einem sehr hohen Aufwand an Kameras, Software und Verarbeitung verbunden.
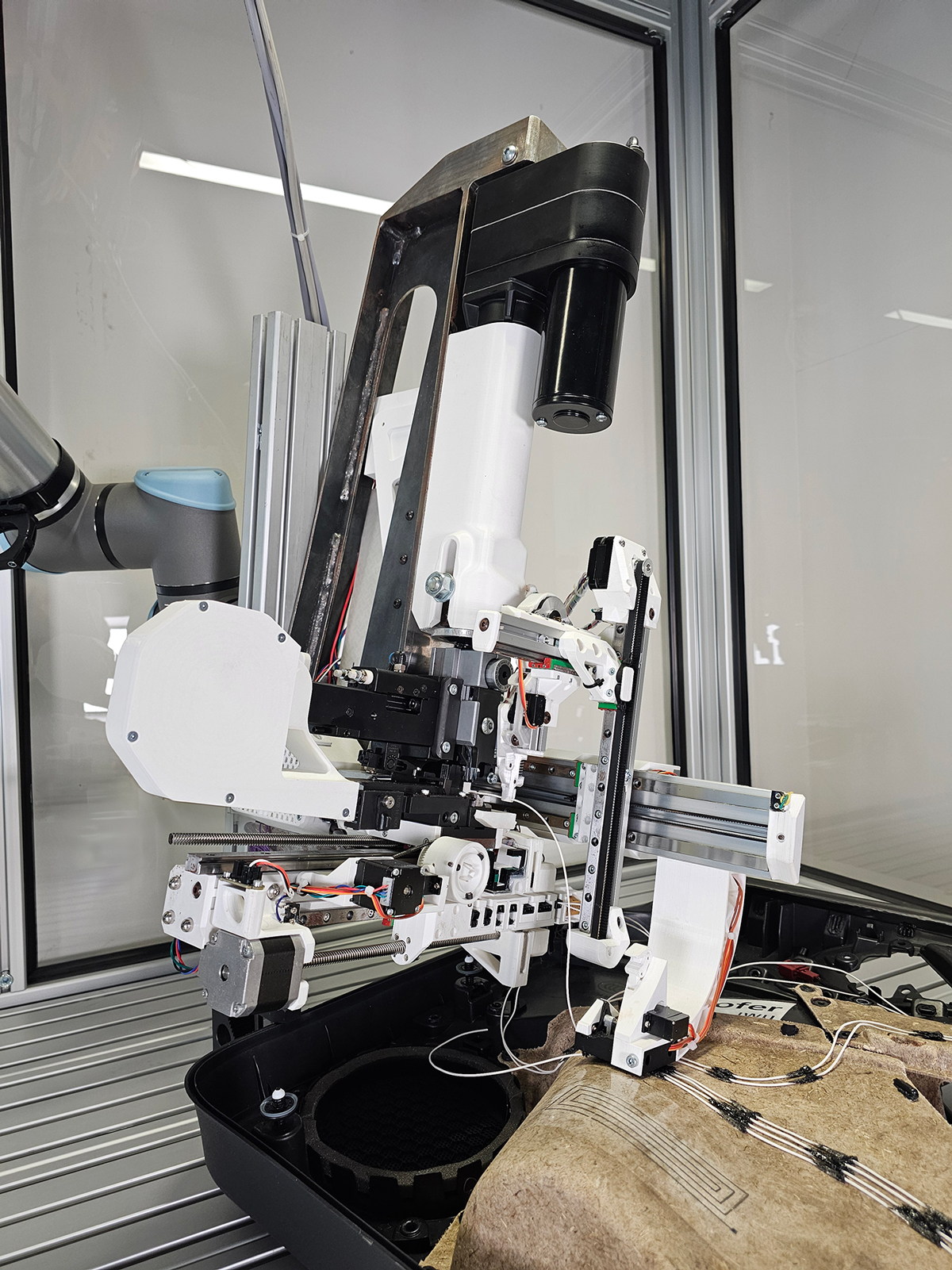
Im AuCA-System wurde das Kabelablegen daher komplett neu gedacht und mit der 3D-Druck-Technologie kombiniert, so dass die biegeschlaffen Kabel nicht mehr »gegriffen« werden müssen, sondern aus einem Endlosreservoir abgelegt werden.