
Bioinspirierte Soft-Robotik-Systeme für die Kognitive Produktion
Projekt BioiC
Zukünftig werden hybride Arbeitsplätze, an denen bioinspirierte Technologien als autonome Systeme und/oder in symbiotischer Zusammenarbeit mit Menschen zum Einsatz kommen, eine immer größere Rolle spielen. Um dies zu ermöglichen, müssen Vorteile der Softrobotik wie Sicherheit und Flexibilität sowie die Möglichkeit, repetitive Aufgaben ermüdungsfrei durchzuführen, in neuen Systemen kombiniert werden.
Im Projekt BioiC (Bioinspired Soft Robotic Systems for Cognitive Production) werden dafür Roboter nach biologischen Vorbildern entwickelt, die für die Produktion essentielle Zielgrößen (wie Kraft und Präzision) erreichen und dennoch inhärent sicher sind bzw. Arbeitsaufgaben dank ihrer kognitiven Fähigkeiten autonom anpassen können. Um dies zu erreichen, werden zwei Ansätze verfolgt:
Entwicklung eines Kontinuumsroboters bestehend aus Strukturkomponenten mit schaltbarer Steifigkeit
Inhalte des Projekts sind vor allem die Weiterentwicklung der auf einem Vakuumansatz basierenden Strukturkomponente hinsichtlich Skalierung und Strukturoptimierung zur Verbesserung der Zielgrößen mithilfe biologischer Vorbilder. Dafür wird u. a. ein Berechnungsmodell aufgebaut, das die strukturellen Abhängigkeiten der funktionellen Eigenschaften des Systems abbilden kann. Auch die Entwicklung und Umsetzung einer mit der schaltbaren Steifigkeit synchronisierten Bewegungsaktorik mit deutlich weniger Stellantrieben als bei vergleichbaren Systemen liegt im Fokus der Arbeit. Zudem werden Konzepte für ein bioinspiriertes Greifersystem entwickelt, die es ermöglichen, formunabhängig Greifaufgaben zu erfüllen (»Griff in die Kiste«) sowie sensibles und/oder biegeschlaffes Stückgut zu fassen und sicher zu transportieren.
Sukzessive Transformation eines Industrieroboters zum Mensch-inspirierten Robotersystem
Ausgangspunkt sind zwei industrielle Roboterkinematiken, die nach menschlichem Vorbild zu einem 2-Arm-Roboter aufgebaut werden. Durch Integration nachgiebiger Komponenten werden neben der Art, Bewegungen auszuführen, auch die Fähigkeiten des Menschen, mit impulsförmigen Krafteinträgen umgehen zu können und dabei Informationen über den Prozess zu sammeln, nachgebildet. Ziel dieses Ansatzes ist es, bestehende Systeme mit Nachgiebigkeit auszurüsten, ohne wesentliche Einbußen in der Steuerbarkeit und Positioniergenauigkeit zu erleiden. Dies gelingt über die Integration eines modellbasierten Steuerungs- und Regelkonzepts, das die Nachgiebigkeiten u. a. in der Bahnplanung berücksichtigt und über zusätzliche Sensoren in der Lage ist, eine situativ optimale Prozessadaption zu bewerkstelligen.
Die Università degli Studi di Napoli Federico II – eine der führenden Einrichtungen in der Robotikforschung weltweit – entwickelt zudem neue Ansätze für Growing Robots und Microbots.
Einblicke in das Projekt
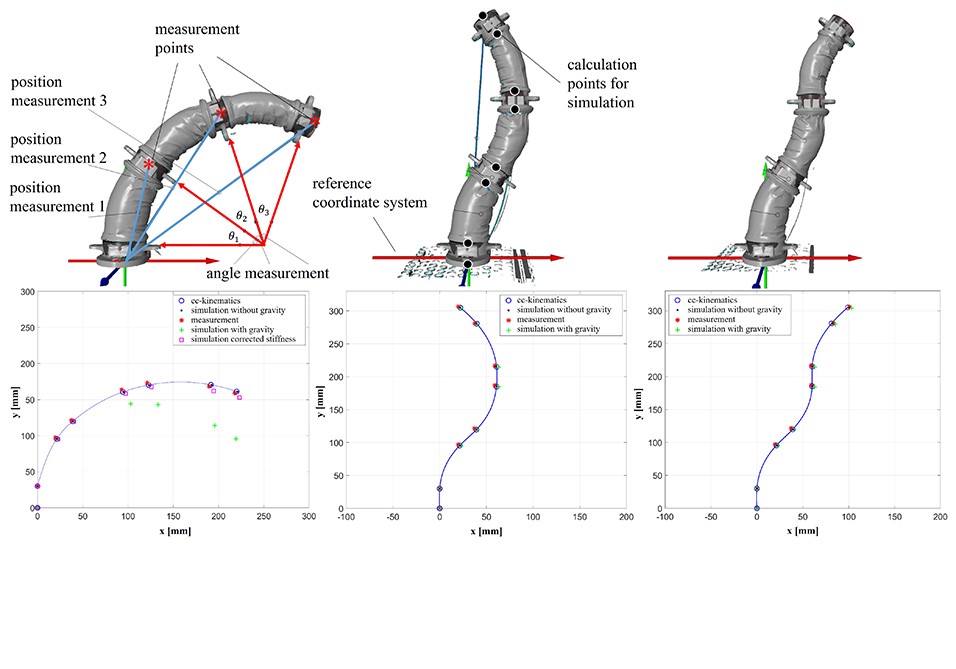
Kinematiksimulation eines Roboterarmes mit 3 Segmenten mit schaltbarer Steifigkeit

Strukturoptimierung nach dem biologischen Vorbild der Crassula Pyramidalis zur Verbesserung der funktionalen Eigenschaften der schaltbaren Steifigkeit
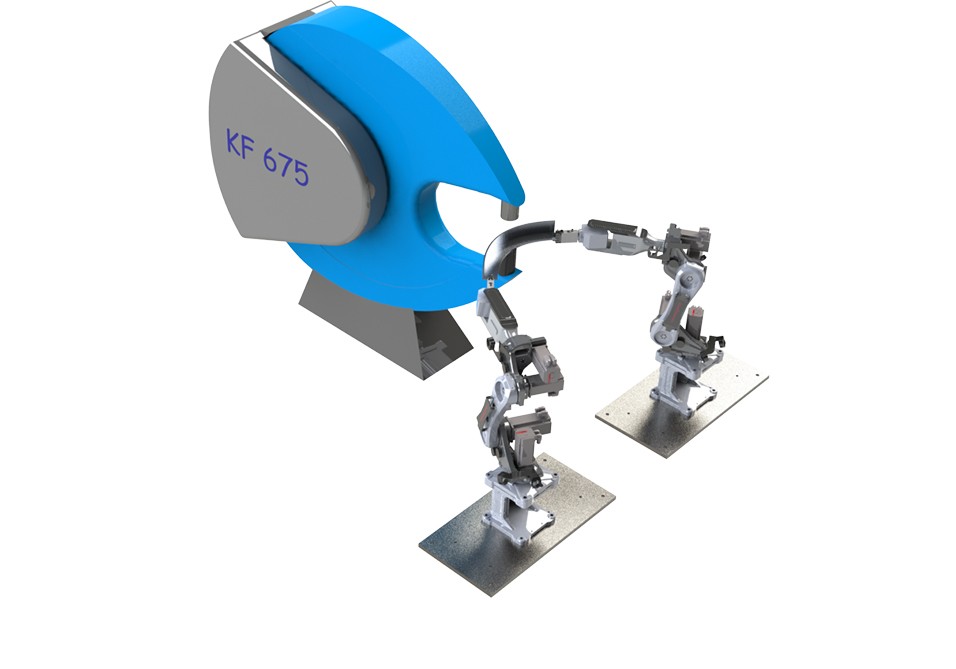
Durch Kognition ermöglichte Kollaboration von 2 Gelenkrobotern mit nachgiebigen Komponenten
Video zum Projekt
Eckdaten zum Projekt
Projektpartner
Università degli Studi di Napoli Federico II, Italien
Publikation
Wockenfuß, W. R.; Brandt, V.; Weisheit, L.; Drossel, W.-G. Design, Modeling and Validation of a Tendon-Driven Soft Continuum Robot for Planar Motion Based on Variable Stiffness Structures. IEEE Robotics and Automation Letters. 2022, 7, 2.