
Adaptive Steifigkeit für die Robotik - AStRo
Herausforderung
Durch den Einsatz von nachgiebigen Materialien in der Soft-Robotik entstehen flexible Systeme, die ein hohes Maß an inhärenter Sicherheit für die Mensch-Maschine-Interaktion aufweisen. Soft-Robotern fehlt dadurch oft die für die Ausübung vieler Tätigkeiten nötige Steifigkeit.
Lösungsansatz
Zur Realisierung einer größeren Tragfähigkeit bei gleichzeitiger Gewährleistung der inhärenten Sicherheit werden im Rahmen des Fraunhofer Cluster of Excellence Programmable Materials (CPM) Strukturen mit adaptiver, also schaltbarer Steifigkeit entwickelt. Dafür wird ein Programmierbares Material designt, das eine wiederholbare und ortsaufgelöst dynamisch schaltbare Steifigkeit inkl. einer Positionsfixierung ermöglicht und als schaltbares Gelenk zur Segmentkopplung u. a. für menschennahe Roboter dienen kann. Durch die Funktionsintegration in die Materialebene kann eine schlanke und akzeptanzsteigernde Bauweise für Roboterstrukturen gelingen.
Hierfür werden in Top-Down-Projekten zwei Ansätze verfolgt, die ausgehend von den Primäranforderungen nach einem hohen Schaltfaktor und hoher Schaltdynamik geeignete Mechanismen identifizieren, im Systemansatz umsetzen und testen, um diese anschließend zu skalieren und in ein Programmierbares Material zu überführen.
Mechanismus Vakuum:
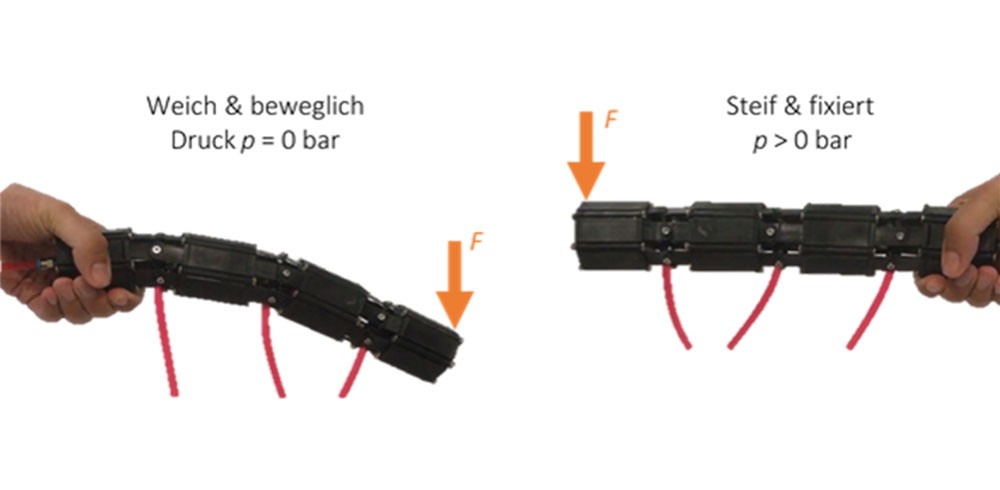
Bei diesem Konzept werden die Effekte der Partikel- und Schichtstauung, bei denen durch die Evakuierung des Systems Partikel und Schichten dichter gepackt bzw. über Reibung miteinander verbunden werden, kombiniert. So wird eine reversibel und wiederholbar schaltbare Steifigkeitsveränderung mit einem Schaltfaktor K > 100 erreicht. Dies ermöglicht die Verformung der Struktur im weichen und eine schnelle Fixierung jeder beliebigen Form durch das Umschalten in den steifen Zustand in weniger als 1 Sekunde. Im Gegensatz zu den meisten Ansätzen erfolgt die Steifigkeitsanpassung dabei entkoppelt von der Bewegungsaktorik, was die Entwicklung völlig neuer Bewegungskonzepte für die Robotik ermöglicht.
Mechanismus Bistabilität:
Bei diesem Ansatz wird ein Programmierbares Material entwickelt, dessen Elementarzellen über einen schaltbaren Rastmechanismus verfügen, der eine Formfixierung der Struktur realisiert. Damit wird die Funktion von der System- in die Materialebene überführt und ermöglicht so ein hohes Maß an Funktionsverdichtung. Um für die Skalierung die Zusammenhänge zwischen Geometrieparametern und funktionellen Eigenschaften der Elementarzellen abbilden zu können, wird zudem ein Simulationsmodell aufgebaut.
Einblicke in das Projekt

Vision: Sichere und leistungsstarke Roboterstruktur mit akzeptanzsteigerndem Design

Strukturkomponente im Systemansatz mit Adaptiver Steifigkeit durch Vakuumansatz
Aufskalierter Funktionsdemonstrator pneumatisch aktivierbarer, schaltbar steifer Einheitszellen
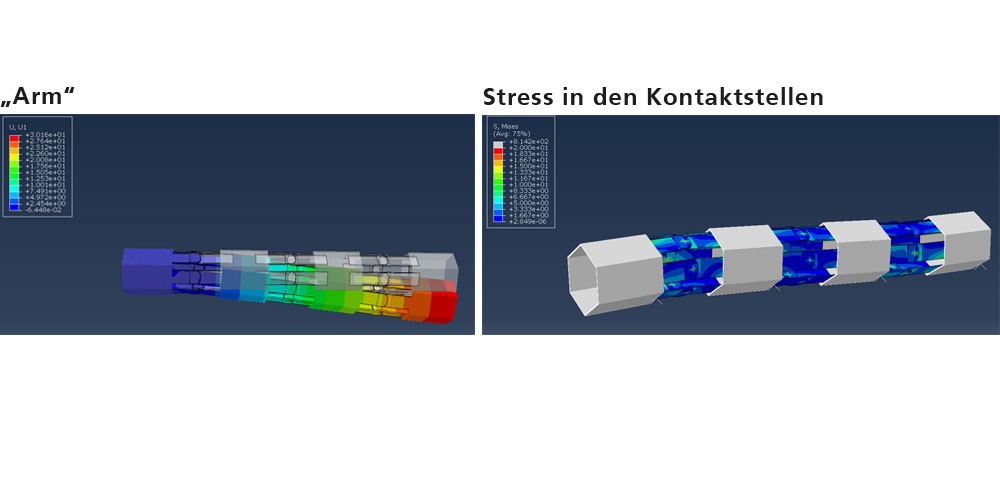
Strukturmechanische Analyse der schaltbar steifen Einheitszellen
Videos zum Projekt
Eckdaten zum Projekt
Projektpartner im Fraunhofer Cluster of Excellence Programmable Materials (CPM):
- Fraunhofer ICT
- Fraunhofer LBF
- Fraunhofer ITWM
- Fraunhofer IWM
- Fraunhofer IWU