Fraunhofer IWU auf dem NexCOBOT-Stand der Hannover Messe 2023, Halle 9/H19
Fraunhofer IWU präsentiert mit Partnern neue Architektur für die Mensch-Roboter-Kollaboration (MRK)
Bei Robotern, die für die MRK bestimmt sind (Cobots), gelten besonders hohe Anforderungen an die Sicherheit der Bewegungsabläufe: Das zentrale Sicherheitsmodul muss Daten aus zahlreichen Sensoren verarbeiten, was viele Kabelverbindungen für Sensoren und Aktoren in traditionellen Roboterarchitekturen und proprietären Lösungen erfordert. Die neue Sicherheitsarchitektur, die vom Fraunhofer IWU, der Synapticon GmbH und NexCOBOT entwickelt wurde, ist dezentral ausgelegt: Sie ermöglicht ein sicheres Miteinander von Mensch und Industrieroboter auch dann, wenn sich die Arbeitssituationen dynamisch verändern – bei deutlich reduziertem Verkabelungsaufwand. Lediglich Strom und Kommunikationsverbindungen müssen zu den Antrieben geführt werden. Ein weiterer Vorteil: Da die Sicherheit der Bewegungsabläufe direkt an der Antriebsachse überwacht wird, verstreicht deutlich weniger Reaktionszeit.
Viele Fertigungsprozesse weisen einen immer höheren Automatisierungsgrad auf. Roboter spielen dabei eine wichtige Rolle, oft arbeiten sie eng mit ihren menschlichen Kollegen zusammen. Der Arbeitssicherheit kommt dabei besondere Bedeutung zu. Das Fraunhofer IWU und seine Industriepartner Synapticon GmbH (Schönaich) sowie NexCOBOT stellen sich dieser Herausforderung mit einer gänzlich neuen Architekturlösung.
Das Herzstück dieser Lösung ist eine dezentrale, generische Steuerungsarchitektur, die für adaptive und hochdynamische Cobots in kollaborativen Anwendungen maßgeschneidert ist. Die zentrale Sicherheitssteuerung berechnet dazu, in welchen Bewegungsbereichen oder Arbeitssituationen sich der Roboter im kollaborativen Betrieb mit reduzierter Geschwindigkeit oder mit begrenzter Leistung und Kraft bewegen muss. Das System umfasst roboterunabhängige, sichere Bewegungssteuerungen für ausfallsichere kollaborative Roboter mit EtherCAT (FSoE) und Echtzeitberechnung kompakter dynamischer Sicherheitsbereiche. Es eignet sich somit perfekt für hocheffiziente und flexible Anwendungen in der Mensch-Roboter-Kollaboration. »Ein intelligentes Sicherheitssystem überwacht die relevanten Bereiche und passt die Robotersteuerung situativ an jede denkbare Interaktion zwischen Mensch und Roboter an«, betont Dr. Mohamad Bdiwi, Teamleiter Kollaborative Robotersysteme am Fraunhofer IWU.
NexCOBOT ist an der neuen Architektur mit seiner ROBASafe SIL 2/SIL 3-Robotersteuerungslösung beteiligt. Diese verkürzt Entwicklungszeiten erheblich und stellt die Leistung bereit, die erforderlich ist, um sowohl Rechenprozesse als auch sicherheitsrelevante Funktionen auf ein und derselben Platine zu unterstützen. Damit kann die Zahl der benötigten Hardwarekomponenten in vielen Anwendungsszenarien reduziert werden.
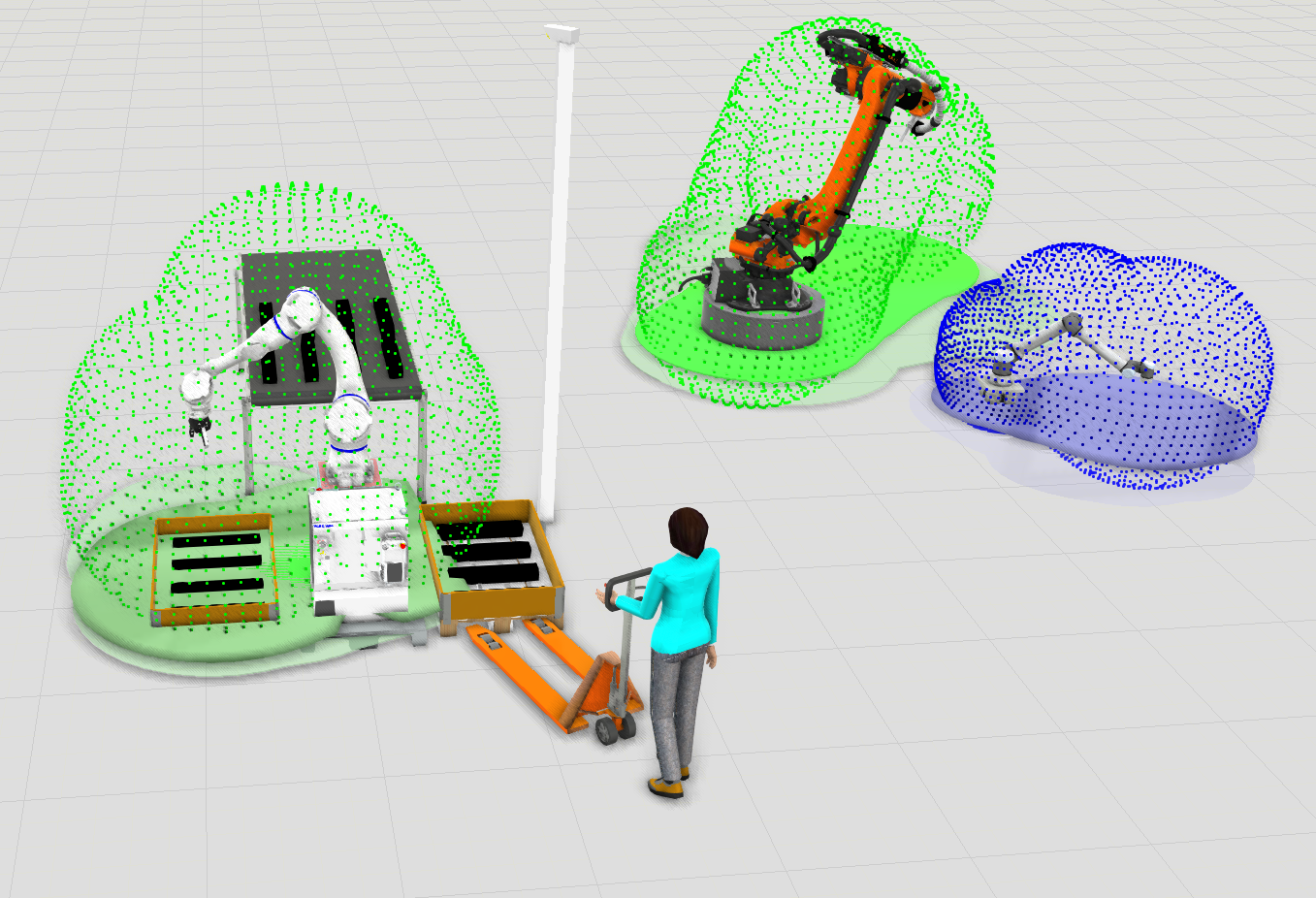
ROBASafe SIL 2/SIL 3 ist in der neuen Sicherheitsarchitektur mit der am Fraunhofer IWU entwickelten, dynamischen 3D-Arbeitsbereichsüberwachung DynaSafe verknüpft. Dank DynaSafe wird die gesamte Fabrik zu einem sicheren, von Mensch und Maschine gemeinsam genutzten Arbeitsraum. Dazu trägt DynaSafe Folgendes bei:
- Ein generisches, modulares Sicherheitssystem (Hardware und Software)
- 3D-Erkennung, Tracking und Klassifizierung von Menschen und beweglichen Objekten
- Echtzeitberechnung und Überwachung dynamischer, kompakter Sicherheitsbereiche
- Virtuelle Erstellung und Validierung des Sicherheitskonzepts
Synapticon entwickelt und produziert Software und Hardware für ausgeklügelte Bewegungssteuerungen in der Robotik und in Hightech-Maschinen. Seine kompakten, effizienten, leistungsstarken und dezentralen Servoantriebe übernehmen die Bewegungssteuerung in der neuen Architekturlösung.