Kompakte Sicherheitsbereiche für die schutzzaunlose Fertigung
Kompakte Anlagen durch effiziente Berechnung von Sicherheitsbereichen
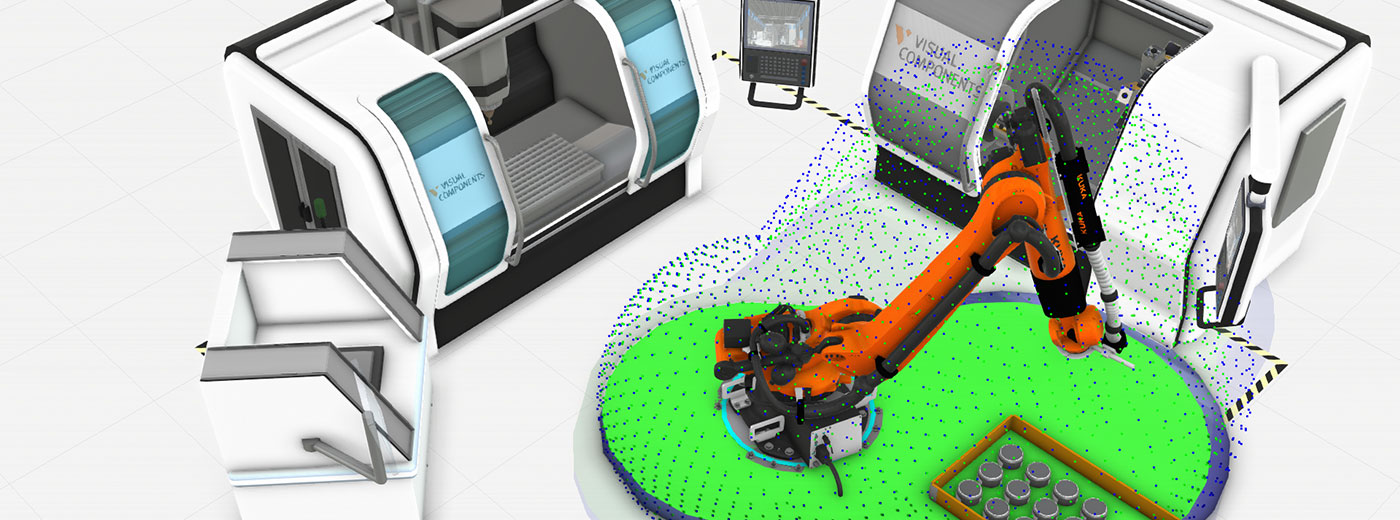
Die am Fraunhofer IWU entwickelte Methode macht es erstmals möglich, Sicherheitsbereiche für roboterbasierte Anlagen effizient und zuverlässig zu berechnen – unabhängig von der Kinematik. Auf der Basis der realen Bewegungsbahnen und Geschwindigkeiten werden – im Gegensatz zum Status Quo – nur dort Gefahrenbereiche berechnet, wo auch Gefahren entstehen können. Das spart Platz und lässt Mensch und Roboter näher zusammenrücken. Gern erstellen wir Ihr Sicherheitskonzept, berechnen die Verriegelungsbereiche und übernehmen die Integration in Engineering-Tools zur Simulation (bspw. Visual Components).
Normkonform und doch besser als die Norm
Sicherheit ist die oberste Maxime bei der Gestaltung von Anlagen. Daher haben wir die Methode durch einen vereidigten Sachverständigen für Maschinensicherheit prüfen und als normkonform bestätigen lassen. Nutzen Sie die Potenziale nicht nur zur Planung konventioneller Anlagen, sondern auch zur Verwirklichung moderner kollaborierender Systeme. Denn auch die Anforderungen nach ISO/TS 15066 werden durch die Methode erfüllt.